Richie Ryulie Suganda
Research Assistant · NAIL Lab · University of Houston

NAIL Lab, University of Houston
122 ENGR4 (SAB2)
14000 University Blvd
Sugar Land, TX 77479
Richie R. Suganda is a 3rd year PhD student in Electrical and Computer Engineering at the University of Houston, working in the NAIL Lab (Networked Autonomous & Intelligent Systems Laboratory) under Dr. Bin Hu.
His research focuses on safe and intelligent autonomous systems, with interests spanning multi-robot coordination, control barrier functions, perception-aware planning, and embedded AI. He bridges theory and real-world deployment, developing algorithms for safety-critical robot control, autonomous navigation, and efficient machine learning on resource-constrained platforms.
He is passionate about building systems that are not only intelligent, but also reliable, scalable, and practical for real-world applications.
📍 Cullen College of Engineering · University of Houston
News
2026
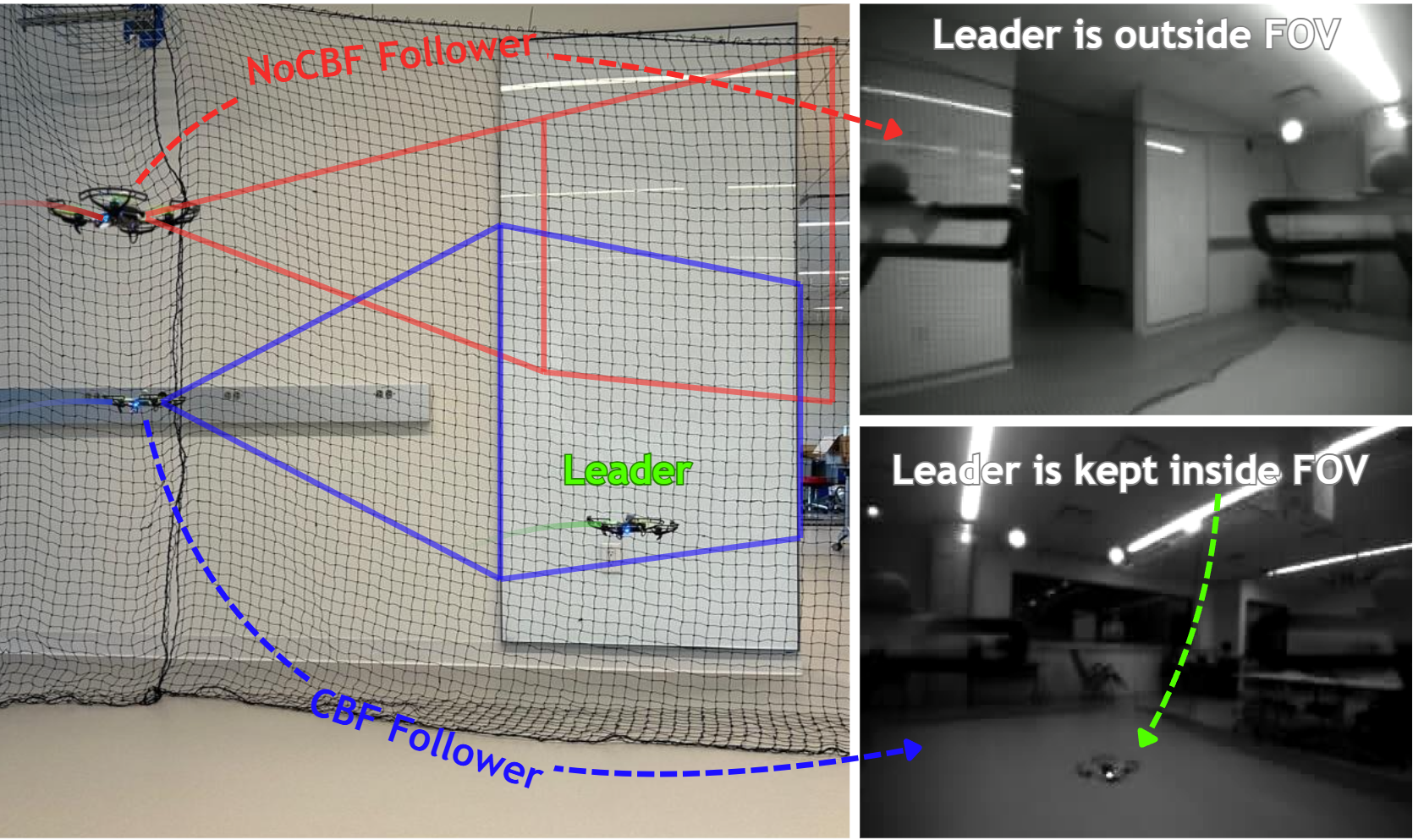
| May 20, 2026 | 📄 New preprint: Distributed 3D Leader-Follower Formation Control with Field-of-View Safety via Control Barrier Functions with Immanuel R. Santjoko, Miao Pan, and Bin Hu is now on arXiv. |
|---|---|
| May 20, 2026 | 📄 New preprint: XiYOLO: Energy-Aware Object Detection via Iterative Architecture Search and Scaling with Tony Tran and Bin Hu is now on arXiv. |
| Mar 15, 2026 | 📄 New preprint: Formation-Aware Adaptive Conformalized Perception for Safe Leader-Follower Multi-Robot Systems with Bin Hu is now on arXiv. |
| Jan 15, 2026 | 📄 A High-Fidelity 3D Simulation Environment for Multi-Aircraft Operations with Timothy Bautista, Fengyu Wang, and colleagues accepted at AIAA SCITECH 2026. |
2025
| May 19, 2025 | 🛸 Toward Embedded LLM-Guided Navigation and Object Detection for Aerial Robots with Bin Hu presented at ICRA 2025 Late Breaking Session. |
|---|---|
| May 19, 2025 | 🤖 Distributed Perception Aware Safe Leader Follower System via Control Barrier Methods with Tony Tran, Miao Pan, Lei Fan, Qin Lin, and Bin Hu presented at IEEE ICRA 2025. |
2024
| Oct 15, 2024 | 📄 Modeling and Output Feedback Control Design of a CoreXY System with Tua A. Tamba presented at IEEE FORTEI-ICEE 2024. |
|---|